Hi !
I’m always working on my script for temporal analysis. But i’m stuck because of slowness of .get_cloud_masks command on large area.
I use BboxSplitter to split my very big area and to have bbox under 5000 pixel height or large:
largeur = int(np.ceil((Xmax_utm - Xmin_utm)/10)) # Calcul de la largeur de l'image
hauteur = int(np.ceil((Ymax_utm - Ymin_utm)/10)) # Calcul de la hauteur de l'image
print('\nArea pixel size: {0} x {1}'.format(largeur,hauteur))
>>>Area pixel size: 9968 x 7245
if largeur > 5000 or hauteur > 5000: # Si la largeur ou la hauteur depasse 5000 pixels
if largeur > 5000:
L = int(np.ceil(largeur/5000))
print('%s cells wide' % (L))
else:
L = 1
if hauteur > 5000:
H = int(np.ceil(hauteur/5000))
print('%s cells high' % (H))
else:
H = 1
>>>2 cells wide
>>>2 cells high
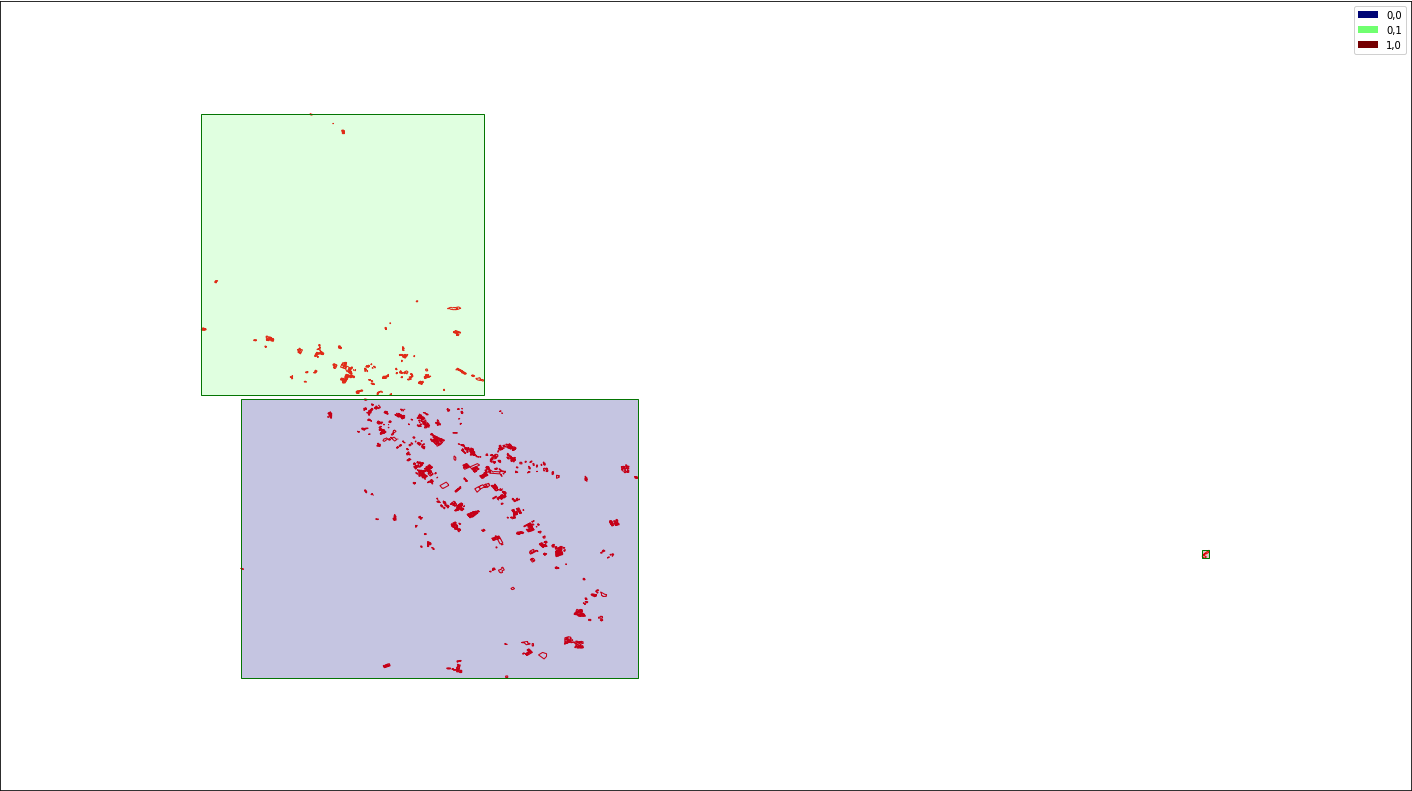
Here is an illustration:
I’m testing it on only 3 dates and it’s already long, so I can’t imagine on 3 years…
Do you have an idea to accelerate it ?
